在本教學的這一部分中,將討論使用哪些技術,可以遍曆圖的所有頂點。
遍曆圖表表示訪問圖的所有節點和頂點。 使用兩種標準方法,可以遍曆圖。接下來將詳細討論它們中。
- 廣度優先搜索
- 深度優先搜索
1. 廣度優先搜索(BFS)演算法
廣度優先搜索是一種圖遍曆演算法,它從根節點開始遍曆圖並探索所有相鄰節點。 然後,它選擇最近的節點並流覽所有未探測的節點。 對於每個最近的節點,該演算法遵循相同的過程,直到找到目標為止。
下麵給出了廣度優先搜索的演算法。演算法從檢查節點A及其所有鄰居開始。在下一步中,搜索A的最近節點的鄰居,並且在後續步驟中繼續處理。 該演算法探索所有節點的所有鄰居,並確保每個節點只訪問一次,並且沒有訪問任何節點兩次。
演算法
第1步:設置狀態 = 1(就緒狀態)
對於G中的每個節點
第2步:將起始節點A排隊
並設置其狀態 = 2
(等待狀態)
第3步:重複第4步和第5步,直到
佇列是空的
第4步:使節點N出列。處理它
並設置其狀態 = 3
(處理狀態)。
第5步:將所有鄰居排隊
N處於就緒狀態
(其STATUS = 1)並設置它們狀態 = 2
(等待狀態)
[迴圈結束]
第6步:退出
示例
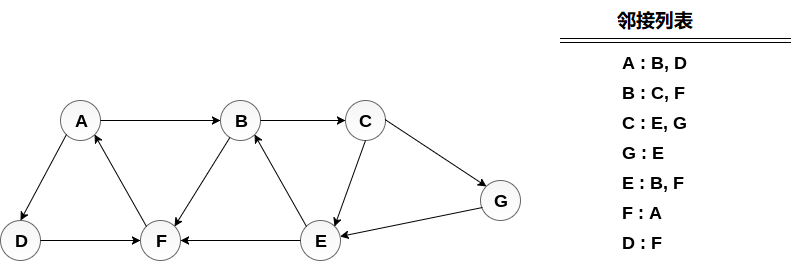
考慮下圖中顯示的圖G,計算從節點A到節點E的最小路徑p。給定每條邊的長度為1。
解答:
最小路徑P可以通過應用廣度優先搜索演算法找到,該演算法將從節點A開始並將以E結束。演算法使用兩個佇列,即QUEUE1和QUEUE2。 QUEUE1保存要處理的所有節點,而QUEUE2保存從QUEUE1處理和刪除的所有節點。
下麵來看看節點A 中的圖。
- 將
A添加到QUEUE1,將NULL添加到QUEUE2。QUEUE1 = {A} QUEUE2 = {NULL} 從
QUEUE1中刪除節點A並插入其所有鄰居,將節點A插入QUEUE2。QUEUE1 = {B, D} QUEUE2 = {A}從
QUEUE1中刪除節點B並插入其所有鄰居。 將節點B插入QUEUE2。QUEUE1 = {D, C, F} QUEUE2 = {A, B}從
QUEUE1中刪除節點D並插入其所有鄰居。 由於F是已插入的唯一鄰居,因此不會再插入它。 將節點D插入QUEUE2。
QUEUE1 = {C, F}
QUEUE2 = { A, B, D}
從
QUEUE1中刪除節點C並插入其所有鄰居。 將節點C添加到QUEUE2。QUEUE1 = {F, E, G} QUEUE2 = {A, B, D, C}從
QUEUE1中刪除F並添加其所有鄰居。由於已經添加了所有鄰居,不會再添加它們。 將節點F添加到QUEUE2。
QUEUE1 = {E, G}
QUEUE2 = {A, B, D, C, F}
- 從
QUEUE1中刪除E,所有E的鄰居都已添加到QUEUE1,因此不會再添加它們。 訪問所有節點,並且目標節點即E遇到QUEUE2。
QUEUE1 = {G}
QUEUE2 = {A, B, D, C, F, E}
現在,使用QUEUE2中可用的節點從E回溯到A。
最小路徑為:A→B→C→E。
上一篇:
圖的表示
下一篇:
深度優先搜索(DFS)演算法